
Hopper überholt konkurrierende Roboter im Kunstsprungwettbewerb • The Register
Mit Stipendien ausgezeichnete Wissenschaftler haben das geschafft, was niemand für möglich gehalten hat – woran vielleicht nur wenige überhaupt gedacht haben – und den Weltrekord für den am höchsten springenden Roboter gebrochen.
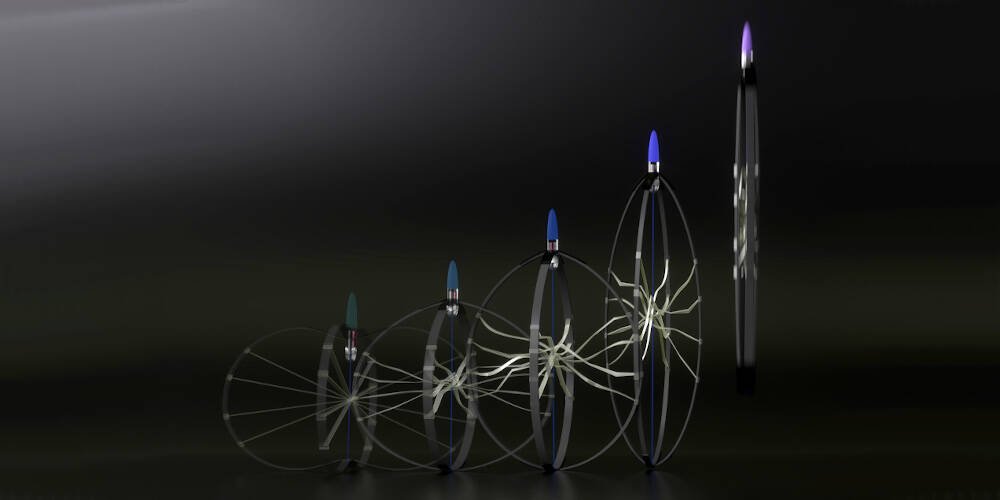
Mit einem Design, das zwei durch Gummibänder zusammengehaltenen Fahrradrädern ähnelt, kann der entworfene Jumper über 30 Meter hoch springen, das 100-fache seiner eigenen Höhe, und könnte eines Tages zu Anwendungen bei der Monderkundung führen.
Der von Elliot Hawkes, Assistenzprofessor von Santa Barbara an der University of California, entworfene künstliche Hüpfer übertrifft laut einem Artikel jedes bekannte mechanische Gerät und ist – relativ gesehen – den besten biologischen Türstehern ebenbürtig veröffentlicht in Natur in dieser Woche.

Die Ergebnisse könnten die Art und Weise, wie wir springende Roboter verwenden, verändern und ein neues Leistungsniveau für künstlich erzeugtes Springen demonstrieren, sagen die Forscher.

Jahrzehntelang haben Ingenieure Sprungmaschinen entworfen, die oft die Biologie nachahmten oder sich von ihr inspirieren ließen. Mit einem Gewicht von nur 30 g und einer Größe von 30 cm kann der künstlich gestaltete Spezialroboter 32,9 Meter hoch springen. Es verwendet einen Rotationsmotor, um die Arbeit zu vervielfachen, und verwendet speziell ausgewählte Federn und Gummibänder, die es dem System ermöglichen, Energie zu speichern.
„Muskeln und Motoren allein können nicht die hohe Leistung erzeugen, die zum Antreiben dieser Springer erforderlich ist. Stattdessen verwenden viele biologische und technische Systeme Muskeln und Motoren, um Energie in raketenähnlichen Strukturen zu speichern. Sie verwenden dann Verriegelungsmechanismen, um die Energie der Feder freizusetzen um den Sprung einzuleiten (zu betätigen). Diese Methode zur Verstärkung der Muskelkraft ist als Riegel-vermittelte Federbetätigung bekannt“, sagte Sarah Bergbreiter, Professorin für Maschinenbau an der Carnegie Mellon, in einem begleitenden Artikel.
Mit diesem Ansatz wird die Frosch, ein winziges pflanzensaugendes Insekt, kann bis zu 70 cm hoch springen, was etwa dem 115-fachen seiner Körperlänge entspricht. Aber das technische Gerät, von dem diese Woche berichtet wurde, erreicht eine ähnliche Leistung im Verhältnis zu seiner Größe, in einem viel größeren Maßstab.
„Ein überraschendes Merkmal des Roboters von Hawkes und seinen Kollegen ist seine relativ große Größe. Die besten federgetriebenen Springer in der Biologie sind im Allgemeinen auf Massen von mehreren Gramm oder weniger beschränkt, während Springer mit größerer Masse (wie Menschen) von direkter Muskelkraft profitieren Kraft statt Federbetätigung. Aber dieser Roboter hat eine Masse von 30 Gramm und ist damit mehr als zehnmal schwerer als die größten federbetätigten springenden Organismen, die ich inspiriert habe“, betont Bergbreiter.

klicken um zu vergrößern
Die Forscher hoffen, dass die Kombination aus Gummiband und Kohlefaser Anwendungen in der realen Welt und darüber hinaus finden wird.
„Unsere Ergebnisse verändern die Auswirkungen des Springens als Fortbewegungsmittel und verändern, wie und wo Springen eingesetzt werden könnte“, heißt es in der Forschungsarbeit.
Auf der Erde könnten hüpfende Roboter Hindernisse überwinden, die zuvor nur von fliegenden Robotern navigiert wurden, während sie Daten basierend auf der Sicht auf den Boden darunter sammeln, sagten die Forscher.
„Auf dem Mond wären die Sprünge des vorgestellten Springers sogar noch höher: 125 m hoch, während er einen halben Kilometer in einem einzigen Satz zurücklegt“, fügten sie hinzu. ®

Hardcore-Musikfanatiker. Food-Evangelist. Freiberuflicher Spieler. Wannabe-Schriftsteller. Wegbereiter der Popkultur. Lebenslanger Unternehmer. Reise-Guru.